Providing a Comprehensive Turn-Key Solution:
From initial hydrodynamic design to complete
product validation,
we offer an unparalleled
expertise and support.
Like the crocodile, expertly adapted for both terrestrial and aquatic environments through evolution, every amphibious vehicle must be optimized to meet specific operational demands on land and in water. At MILPOD, we are committed to partnering with you from the development phase, ensuring that every contractual requirement is not just met, but exceeded.
About US
ABOUT US
INNOVATIVE SOLUTIONS FOR AMPHIBIOUS OPERATIONS
Welcome to MILPOD — where innovation converges with engineering excellence. Discover our journey and our mission to redefine vehicular performance in amphibious operations. Dive into our company profile to learn about the passion and dedication that propel us forward.
We are constantly pushing the boundaries in the maritime and defense industries, consistently surpassing expectations with groundbreaking solutions that set new standards for quality and efficiency.
propulsion units delivered so far
0
products
Products
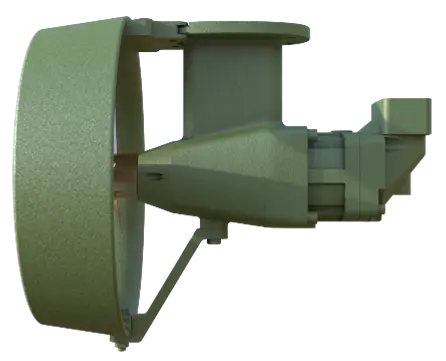
Discover Our
Propulsion Solutions
At MILPOD, we are committed to delivering groundbreaking propulsion solutions that enhance the capabilities of amphibious vehicles. Our portfolio features a diverse array of systems, each meticulously engineered for optimal performance in water operations. These solutions offer unmatched reliability and adaptability, ensuring peak performance under any condition.
From advanced podded propeller systems to bespoke engineering solutions, each offering embodies the highest standards of technological innovation and engineering prowess. Whether you seek high-speed propulsion, superior maneuverability or tailored integration, MILPOD provides the precise solution to elevate your operational effectiveness. Yes, this is not just a product but a complete solution, covering all potential auxiliaries such as gears, couplings, control system, as well as the propulsion unit itself.
Explore our comprehensive range of propulsion systems and see how MILPOD can transform the performance, efficiency and reliability of your vehicles across diverse environments.



services
services
Innovative Services for Amphibious System Design
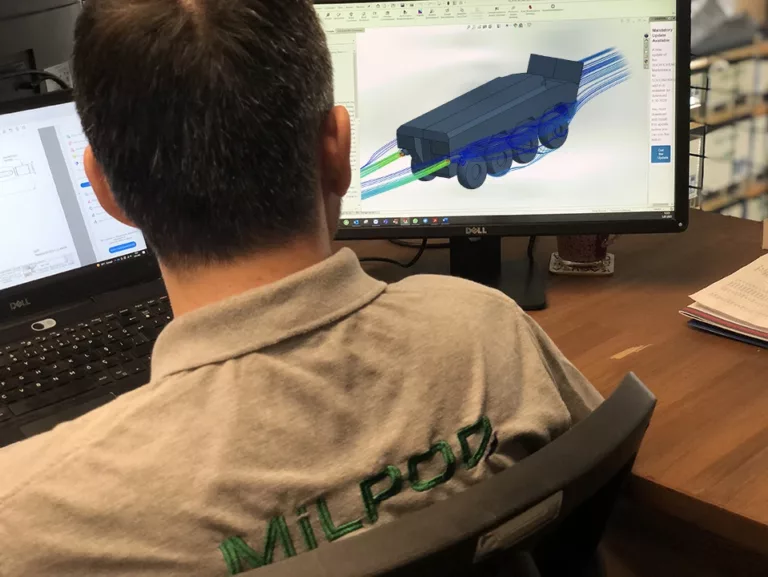
At MILPOD, we specialize in developing bespoke propulsion systems for amphibious vehicles within the defense sector. From initial concept design to prototype production, our approach is rooted in advanced hydrodynamics and in-water propulsion technologies, ensuring high-quality, efficient solutions tailored to meet the exacting demands of our clients. As a complete solution provider, we integrate seamlessly with your development team, offering dedicated engineering support not just for propulsion needs but also for critical subsystems including hydraulic engineering and control & monitoring.
Our comprehensive services extend from vehicle requirement analysis and detailed mechanical design to rigorous product testing. We emphasize CFD and FEM optimization to ensure every solution is innovative, practical, and sustainable. Committed to precision and excellence, our team delivers integrated logistic support and cutting-edge propulsion systems that empower our clients with reliability and superior performance.
Sustainability
Sustainability
Engineering a Sustainable Future
At MILPOD, we recognize the critical importance of sustainability in shaping the future of society, the environment and the economy. We are committed to embodying this principle across our operations, proudly aligning our initiatives with the United Nations’ 17 Sustainable Development Goals. Our sustainable identity is reflected through both our innovative brand and the dedicated efforts of our team.